İstanbul,
28°C
az bulutlu
ABD ordusu, 1980’lerde milyonlarca dolar harcayarak altı ayaklı yürüyen kamyonlar geliştirdi.

1980’li yılların başında ABD ordusu, gezegen üzerindeki kara parçalarının büyük bir kısmının geleneksel tekerli ve paletli taşıtlarla geçilemediğini fark etti. Bu zorlu engellerle başa çıkabilmek amacıyla Ohio State Üniversitesi ve birkaç harici müteahhit ile işbirliği yaparak, Uyumlu Süspansiyon Taşıtı’nı (ASV) geliştirmeye karar verdiler. Bu altı ayaklı yürüyen kamyonlar, o dönemde milyonlarca dolarlık bir yatırımla hayata geçirildi.
ASV, o dönem için oldukça karmaşık bir makine olarak kabul ediliyordu. Ancak bilim kurgu sayfalarında yer alan yürüyen makineleri gerçeğe dönüştürmede önemli bir adım atılmıştı. Projeyi yürüten Savunma Bakanlığı’nın İleri Araştırma Projeleri Ajansı (DARPA), 1981 yılında başlayan bu projeyle altı yıl boyunca yoğun bir çalışma yürüttü. ASV’nin geliştirilmesinde yer alan ekipler, mühendisler ve bilim insanları, teknolojinin sınırlarını zorlayarak benzersiz bir taşıt ortaya çıkarmayı hedefliyordu.
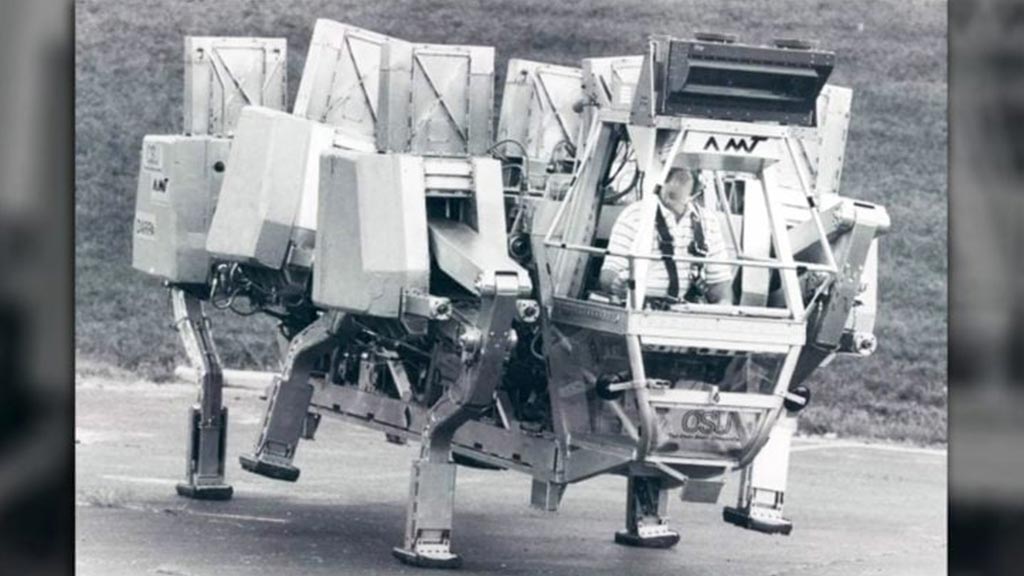
ASV’nin temel özelliği, altı adet hidrolik bacakla hareket edebilmesiydi. Bu bacaklar, bir makine operatörü tarafından kontrol edilerek taşıtın istenilen şekilde hareket etmesini sağlıyordu. Ancak bu taşıt, hantal ve yavaş bir yapıya sahipti. Bununla birlikte, ASV’nin altı bacağını yöneten 17 adet bilgisayar, operatörün fiziksel ve zihinsel olarak tükenmemesini sağlamak için özenle tasarlanmıştı. Her bir bacak, altı adet Intel ’86/30 128k, 8-bit bilgisayar tarafından kontrol ediliyordu. Bunun yanı sıra, ASV’de bulunan diğer 11 bilgisayar ise çeşitli görevler üstleniyordu. Bu görevler arasında kokpit içindeki CRT ekranları kontrol etmek, ayaklardan ve basınç algılayıcılarından gelen verileri analiz etmek ve makinenin en iyi ayak basma noktalarını belirlemek yer alıyordu.
ASV’nin işletim yazılımı, Pascal programlama dili kullanılarak yazılmıştır ve yaklaşık 150.000 satır koddan oluşmaktadır. Bu yazılım, taşıtın aylak aylak gezinmesini sağlamak için gerekli olan verileri yorumlayarak hareketleri kontrol etmektedir.
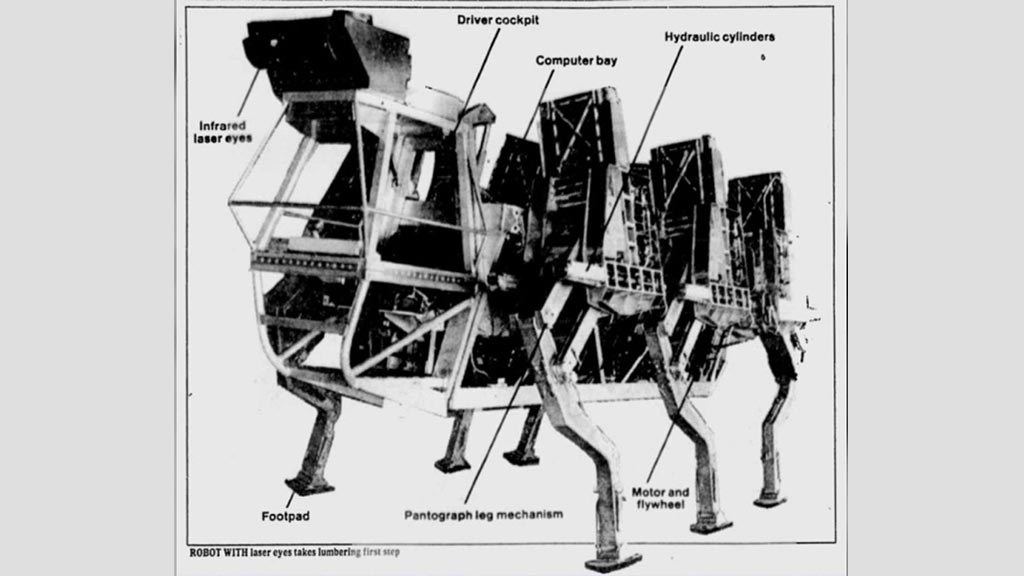
Ancak ASV, sürülen bir araçtan ziyade “idare edilen” bir makine olarak tanımlanmaktadır. Operatör, klavye ve joystick yardımıyla ASV’ye nereye gitmesi gerektiğini söyleyerek taşıtı yönlendirmektedir. Operatörün talimatlarına göre ASV, engelleri aşmak, zorlu arazilerde hareket etmek ve istenen konumlara ulaşmak için altı bacağını kullanmaktadır. Bu sayede, kara parçalarının büyük bir kısmının geçilemediği alanlarda dahi ilerleyebilen bir makine olarak öne çıkmaktadır.
Projenin başlangıcından itibaren büyük bir ilgiyle karşılanan ASV, geliştirilme süreci boyunca birçok zorlukla karşılaşmıştır. Ancak teknoloji ve mühendislik alanındaki ilerlemelerle birlikte, bu altı ayaklı yürüyen kamyonlar önemli bir başarı elde etmiştir. ASV’nin geliştirilmesiyle birlikte, askeri operasyonlarda zorlu arazi şartlarında hareket etme kabiliyeti önemli ölçüde artmış ve askerlere yeni olanaklar sunulmuştur.
Ne yazık ki, projeye olan ilgi zamanla azalmış ve proje 1990 yılında sona erdirilmiştir. Ancak ASV’nin geliştirilme süreci ve elde ettiği başarılar, askeri araştırma ve teknolojide önemli bir kilometre taşı olarak kabul edilmektedir. Günümüzde, ASV’nin geliştirilmesiyle kazanılan bilgi ve deneyim, benzer projelerin ve robotik taşıtların ilerlemesine ilham kaynağı olmuştur.
İlginizi Çekebilir: Elektrikli Araçlara Geçmenin Vakti Geldi mi?






